
Tag Archivio per: reflex
 https://www.osservatorio-hypatia.it/wp-content/uploads/2017/01/20160728_010905.jpg
3096
4128
Fabio Mortari
https://www.osservatorio-hypatia.it/wp-content/uploads/2020/08/hypa-300x85.png
Fabio Mortari2017-03-02 10:18:472017-03-02 10:18:47Un Controller per cella di Peltier con Arduino – Parte V – Il PCB
https://www.osservatorio-hypatia.it/wp-content/uploads/2017/01/20160728_010905.jpg
3096
4128
Fabio Mortari
https://www.osservatorio-hypatia.it/wp-content/uploads/2020/08/hypa-300x85.png
Fabio Mortari2017-03-02 10:18:472017-03-02 10:18:47Un Controller per cella di Peltier con Arduino – Parte V – Il PCB https://www.osservatorio-hypatia.it/wp-content/uploads/2017/01/Button-Firmware_1409805694.png
267
535
Fabio Mortari
https://www.osservatorio-hypatia.it/wp-content/uploads/2020/08/hypa-300x85.png
Fabio Mortari2017-01-29 13:00:372017-01-29 13:00:37Controller per Peltier Con Arduino – Parte IV – Lo Sketch
https://www.osservatorio-hypatia.it/wp-content/uploads/2017/01/Button-Firmware_1409805694.png
267
535
Fabio Mortari
https://www.osservatorio-hypatia.it/wp-content/uploads/2020/08/hypa-300x85.png
Fabio Mortari2017-01-29 13:00:372017-01-29 13:00:37Controller per Peltier Con Arduino – Parte IV – Lo Sketch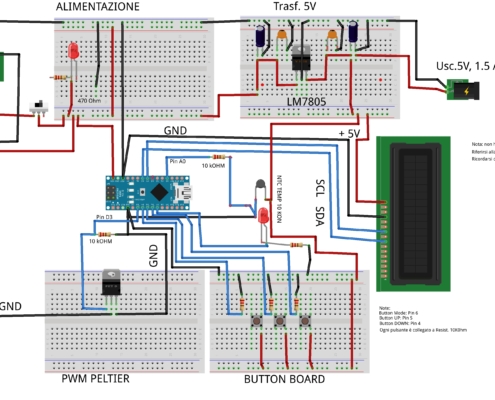 https://www.osservatorio-hypatia.it/wp-content/uploads/2017/01/BUTTON_bb.jpg
2193
4575
Fabio Mortari
https://www.osservatorio-hypatia.it/wp-content/uploads/2020/08/hypa-300x85.png
Fabio Mortari2017-01-28 08:00:592017-01-28 08:00:59Controller per Peltier Con Arduino – Parte III – Facciamolo a Pezzi
https://www.osservatorio-hypatia.it/wp-content/uploads/2017/01/BUTTON_bb.jpg
2193
4575
Fabio Mortari
https://www.osservatorio-hypatia.it/wp-content/uploads/2020/08/hypa-300x85.png
Fabio Mortari2017-01-28 08:00:592017-01-28 08:00:59Controller per Peltier Con Arduino – Parte III – Facciamolo a Pezzi https://www.osservatorio-hypatia.it/wp-content/uploads/2017/01/lista.jpg
198
280
Fabio Mortari
https://www.osservatorio-hypatia.it/wp-content/uploads/2020/08/hypa-300x85.png
Fabio Mortari2017-01-27 11:00:252017-01-27 11:00:25Controller per Peltier con Arduino – Parte II – La Lista della Spesa
https://www.osservatorio-hypatia.it/wp-content/uploads/2017/01/lista.jpg
198
280
Fabio Mortari
https://www.osservatorio-hypatia.it/wp-content/uploads/2020/08/hypa-300x85.png
Fabio Mortari2017-01-27 11:00:252017-01-27 11:00:25Controller per Peltier con Arduino – Parte II – La Lista della Spesa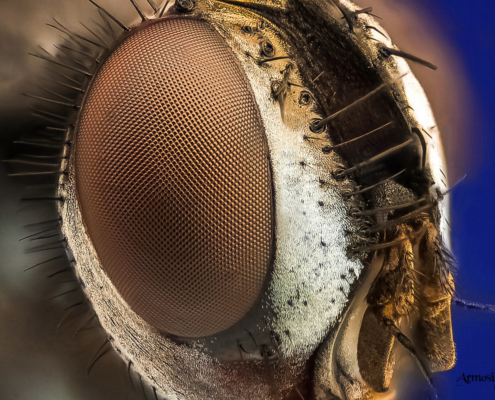 https://www.osservatorio-hypatia.it/wp-content/uploads/2016/02/MOSCA.jpg
800
1200
Fabio Mortari
https://www.osservatorio-hypatia.it/wp-content/uploads/2020/08/hypa-300x85.png
Fabio Mortari2016-02-23 11:36:082016-02-23 11:36:08L’importanza degli Arcosecondi.
https://www.osservatorio-hypatia.it/wp-content/uploads/2016/02/MOSCA.jpg
800
1200
Fabio Mortari
https://www.osservatorio-hypatia.it/wp-content/uploads/2020/08/hypa-300x85.png
Fabio Mortari2016-02-23 11:36:082016-02-23 11:36:08L’importanza degli Arcosecondi.