
 https://www.osservatorio-hypatia.it/wp-content/uploads/2022/02/1R.png
1648
1413
Loris Ferrini
https://www.osservatorio-hypatia.it/wp-content/uploads/2020/08/hypa-300x85.png
Loris Ferrini2022-02-07 14:24:522022-02-07 14:29:03Cosa fotografare nel il cielo di febbraio
https://www.osservatorio-hypatia.it/wp-content/uploads/2022/02/1R.png
1648
1413
Loris Ferrini
https://www.osservatorio-hypatia.it/wp-content/uploads/2020/08/hypa-300x85.png
Loris Ferrini2022-02-07 14:24:522022-02-07 14:29:03Cosa fotografare nel il cielo di febbraio https://www.osservatorio-hypatia.it/wp-content/uploads/2022/01/download.jpg
180
279
Fabio Balestra
https://www.osservatorio-hypatia.it/wp-content/uploads/2020/08/hypa-300x85.png
Fabio Balestra2022-01-10 21:34:152022-01-10 21:34:16Osservazione del Sole in proiezione
https://www.osservatorio-hypatia.it/wp-content/uploads/2022/01/download.jpg
180
279
Fabio Balestra
https://www.osservatorio-hypatia.it/wp-content/uploads/2020/08/hypa-300x85.png
Fabio Balestra2022-01-10 21:34:152022-01-10 21:34:16Osservazione del Sole in proiezione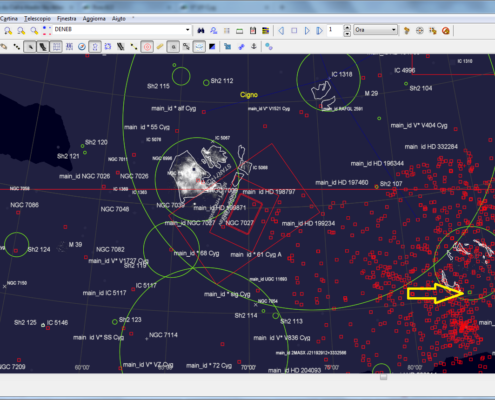 https://www.osservatorio-hypatia.it/wp-content/uploads/2017/07/11.png
860
1598
Fabio Mortari
https://www.osservatorio-hypatia.it/wp-content/uploads/2020/08/hypa-300x85.png
Fabio Mortari2017-07-20 11:19:092017-07-20 11:19:09Cartes du Ciel, Aladin Sky Atlas e i cataloghi
https://www.osservatorio-hypatia.it/wp-content/uploads/2017/07/11.png
860
1598
Fabio Mortari
https://www.osservatorio-hypatia.it/wp-content/uploads/2020/08/hypa-300x85.png
Fabio Mortari2017-07-20 11:19:092017-07-20 11:19:09Cartes du Ciel, Aladin Sky Atlas e i cataloghi https://www.osservatorio-hypatia.it/wp-content/uploads/2017/01/20160728_010905.jpg
3096
4128
Fabio Mortari
https://www.osservatorio-hypatia.it/wp-content/uploads/2020/08/hypa-300x85.png
Fabio Mortari2017-03-02 10:18:472017-03-02 10:18:47Un Controller per cella di Peltier con Arduino – Parte V – Il PCB
https://www.osservatorio-hypatia.it/wp-content/uploads/2017/01/20160728_010905.jpg
3096
4128
Fabio Mortari
https://www.osservatorio-hypatia.it/wp-content/uploads/2020/08/hypa-300x85.png
Fabio Mortari2017-03-02 10:18:472017-03-02 10:18:47Un Controller per cella di Peltier con Arduino – Parte V – Il PCB https://www.osservatorio-hypatia.it/wp-content/uploads/2017/01/16426352_10209422725739744_900265831_n.jpg
720
960
Fabio Mortari
https://www.osservatorio-hypatia.it/wp-content/uploads/2020/08/hypa-300x85.png
Fabio Mortari2017-01-30 10:18:522017-01-30 10:18:52Un Pc da 100 Euro per le nostre sessioni Astrofotografiche – Di Paolo Scatena
https://www.osservatorio-hypatia.it/wp-content/uploads/2017/01/16426352_10209422725739744_900265831_n.jpg
720
960
Fabio Mortari
https://www.osservatorio-hypatia.it/wp-content/uploads/2020/08/hypa-300x85.png
Fabio Mortari2017-01-30 10:18:522017-01-30 10:18:52Un Pc da 100 Euro per le nostre sessioni Astrofotografiche – Di Paolo Scatena https://www.osservatorio-hypatia.it/wp-content/uploads/2017/01/Button-Firmware_1409805694.png
267
535
Fabio Mortari
https://www.osservatorio-hypatia.it/wp-content/uploads/2020/08/hypa-300x85.png
Fabio Mortari2017-01-29 13:00:372017-01-29 13:00:37Controller per Peltier Con Arduino – Parte IV – Lo Sketch
https://www.osservatorio-hypatia.it/wp-content/uploads/2017/01/Button-Firmware_1409805694.png
267
535
Fabio Mortari
https://www.osservatorio-hypatia.it/wp-content/uploads/2020/08/hypa-300x85.png
Fabio Mortari2017-01-29 13:00:372017-01-29 13:00:37Controller per Peltier Con Arduino – Parte IV – Lo Sketch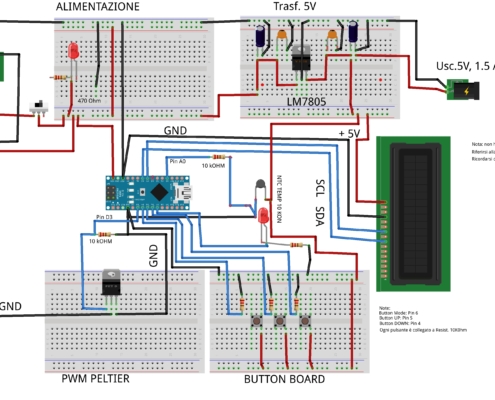 https://www.osservatorio-hypatia.it/wp-content/uploads/2017/01/BUTTON_bb.jpg
2193
4575
Fabio Mortari
https://www.osservatorio-hypatia.it/wp-content/uploads/2020/08/hypa-300x85.png
Fabio Mortari2017-01-28 08:00:592017-01-28 08:00:59Controller per Peltier Con Arduino – Parte III – Facciamolo a Pezzi
https://www.osservatorio-hypatia.it/wp-content/uploads/2017/01/BUTTON_bb.jpg
2193
4575
Fabio Mortari
https://www.osservatorio-hypatia.it/wp-content/uploads/2020/08/hypa-300x85.png
Fabio Mortari2017-01-28 08:00:592017-01-28 08:00:59Controller per Peltier Con Arduino – Parte III – Facciamolo a Pezzi https://www.osservatorio-hypatia.it/wp-content/uploads/2017/01/lista.jpg
198
280
Fabio Mortari
https://www.osservatorio-hypatia.it/wp-content/uploads/2020/08/hypa-300x85.png
Fabio Mortari2017-01-27 11:00:252017-01-27 11:00:25Controller per Peltier con Arduino – Parte II – La Lista della Spesa
https://www.osservatorio-hypatia.it/wp-content/uploads/2017/01/20160728_010905.jpg
3096
4128
Fabio Mortari
https://www.osservatorio-hypatia.it/wp-content/uploads/2020/08/hypa-300x85.png
Fabio Mortari2017-01-26 12:12:322017-01-26 12:12:32Controller per Peltier con Arduino – Parte 1
https://www.osservatorio-hypatia.it/wp-content/uploads/2017/01/lista.jpg
198
280
Fabio Mortari
https://www.osservatorio-hypatia.it/wp-content/uploads/2020/08/hypa-300x85.png
Fabio Mortari2017-01-27 11:00:252017-01-27 11:00:25Controller per Peltier con Arduino – Parte II – La Lista della Spesa
https://www.osservatorio-hypatia.it/wp-content/uploads/2017/01/20160728_010905.jpg
3096
4128
Fabio Mortari
https://www.osservatorio-hypatia.it/wp-content/uploads/2020/08/hypa-300x85.png
Fabio Mortari2017-01-26 12:12:322017-01-26 12:12:32Controller per Peltier con Arduino – Parte 1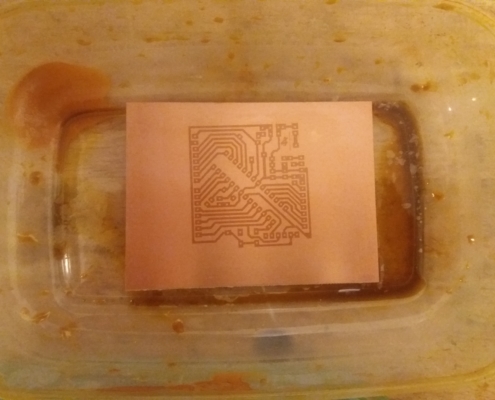 https://www.osservatorio-hypatia.it/wp-content/uploads/2017/01/20160705_211640.jpg
3096
4128
Fabio Mortari
https://www.osservatorio-hypatia.it/wp-content/uploads/2020/08/hypa-300x85.png
Fabio Mortari2017-01-18 18:05:192017-01-18 18:05:19Benritrovati…e…Iniziamo dal Bromografo
https://www.osservatorio-hypatia.it/wp-content/uploads/2017/01/20160705_211640.jpg
3096
4128
Fabio Mortari
https://www.osservatorio-hypatia.it/wp-content/uploads/2020/08/hypa-300x85.png
Fabio Mortari2017-01-18 18:05:192017-01-18 18:05:19Benritrovati…e…Iniziamo dal Bromografo