
Tag Archivio per: tutorial
 https://www.osservatorio-hypatia.it/wp-content/uploads/2017/01/20160728_010905.jpg
3096
4128
Fabio Mortari
https://www.osservatorio-hypatia.it/wp-content/uploads/2020/08/hypa-300x85.png
Fabio Mortari2017-03-02 10:18:472017-03-02 10:18:47Un Controller per cella di Peltier con Arduino – Parte V – Il PCB
https://www.osservatorio-hypatia.it/wp-content/uploads/2017/01/20160728_010905.jpg
3096
4128
Fabio Mortari
https://www.osservatorio-hypatia.it/wp-content/uploads/2020/08/hypa-300x85.png
Fabio Mortari2017-03-02 10:18:472017-03-02 10:18:47Un Controller per cella di Peltier con Arduino – Parte V – Il PCB https://www.osservatorio-hypatia.it/wp-content/uploads/2016/02/Telescope_Drive_Master_LX200_foto1.jpg
333
500
Fabio Mortari
https://www.osservatorio-hypatia.it/wp-content/uploads/2020/08/hypa-300x85.png
Fabio Mortari2016-02-17 13:35:292016-02-17 13:35:29Ricerca Supernovae: La Creazione dei master
https://www.osservatorio-hypatia.it/wp-content/uploads/2016/02/Telescope_Drive_Master_LX200_foto1.jpg
333
500
Fabio Mortari
https://www.osservatorio-hypatia.it/wp-content/uploads/2020/08/hypa-300x85.png
Fabio Mortari2016-02-17 13:35:292016-02-17 13:35:29Ricerca Supernovae: La Creazione dei master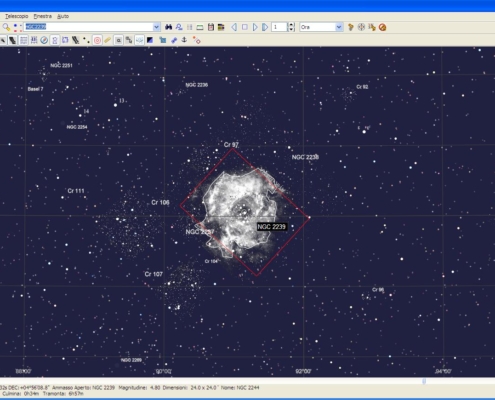 https://www.osservatorio-hypatia.it/wp-content/uploads/2015/01/5.jpg
870
1600
Fabio Mortari
https://www.osservatorio-hypatia.it/wp-content/uploads/2020/08/hypa-300x85.png
Fabio Mortari2015-01-14 10:08:402015-01-14 10:08:40Cartes Du Ciel: Valutare il campo inquadrato
https://www.osservatorio-hypatia.it/wp-content/uploads/2020/08/hypa-300x85.png
0
0
Fabio Mortari
https://www.osservatorio-hypatia.it/wp-content/uploads/2020/08/hypa-300x85.png
Fabio Mortari2014-08-12 09:56:362014-08-12 09:56:36Installazione e collegamento Eqmod
https://www.osservatorio-hypatia.it/wp-content/uploads/2015/01/5.jpg
870
1600
Fabio Mortari
https://www.osservatorio-hypatia.it/wp-content/uploads/2020/08/hypa-300x85.png
Fabio Mortari2015-01-14 10:08:402015-01-14 10:08:40Cartes Du Ciel: Valutare il campo inquadrato
https://www.osservatorio-hypatia.it/wp-content/uploads/2020/08/hypa-300x85.png
0
0
Fabio Mortari
https://www.osservatorio-hypatia.it/wp-content/uploads/2020/08/hypa-300x85.png
Fabio Mortari2014-08-12 09:56:362014-08-12 09:56:36Installazione e collegamento Eqmod