
Tag Archivio per: ascom
 https://www.osservatorio-hypatia.it/wp-content/uploads/2017/07/11.png
860
1598
Fabio Mortari
https://www.osservatorio-hypatia.it/wp-content/uploads/2020/08/hypa-300x85.png
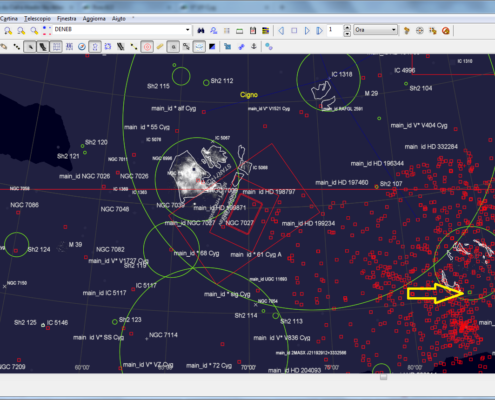
Fabio Mortari2017-07-20 11:19:092017-07-20 11:19:09Cartes du Ciel, Aladin Sky Atlas e i cataloghi
https://www.osservatorio-hypatia.it/wp-content/uploads/2017/07/11.png
860
1598
Fabio Mortari
https://www.osservatorio-hypatia.it/wp-content/uploads/2020/08/hypa-300x85.png
Fabio Mortari2017-07-20 11:19:092017-07-20 11:19:09Cartes du Ciel, Aladin Sky Atlas e i cataloghi https://www.osservatorio-hypatia.it/wp-content/uploads/2016/02/CEFHuqiUIAAtxG9.png
256
256
Fabio Mortari
https://www.osservatorio-hypatia.it/wp-content/uploads/2020/08/hypa-300x85.png
Fabio Mortari2016-02-11 17:47:212016-02-11 17:47:21Linux e DistroAstro: tra Divulgazione, Astrofotografia e Ricerca
https://www.osservatorio-hypatia.it/wp-content/uploads/2016/02/CEFHuqiUIAAtxG9.png
256
256
Fabio Mortari
https://www.osservatorio-hypatia.it/wp-content/uploads/2020/08/hypa-300x85.png
Fabio Mortari2016-02-11 17:47:212016-02-11 17:47:21Linux e DistroAstro: tra Divulgazione, Astrofotografia e Ricerca https://www.osservatorio-hypatia.it/wp-content/uploads/2015/07/nerdmomentalbumart_300px.jpg
300
300
Fabio Mortari
https://www.osservatorio-hypatia.it/wp-content/uploads/2020/08/hypa-300x85.png
Fabio Mortari2015-07-31 17:21:352015-07-31 17:21:35Nerd Moment!: Si possono risolvere immagini prese su internet e utilizzarle con Pinpoint?
https://www.osservatorio-hypatia.it/wp-content/uploads/2015/07/nerdmomentalbumart_300px.jpg
300
300
Fabio Mortari
https://www.osservatorio-hypatia.it/wp-content/uploads/2020/08/hypa-300x85.png
Fabio Mortari2015-07-31 17:21:352015-07-31 17:21:35Nerd Moment!: Si possono risolvere immagini prese su internet e utilizzarle con Pinpoint? https://www.osservatorio-hypatia.it/wp-content/uploads/2014/11/10427674_519158714853548_6255494638199687088_n.jpg
803
960
Fabio Mortari
https://www.osservatorio-hypatia.it/wp-content/uploads/2020/08/hypa-300x85.png
Fabio Mortari2014-11-20 11:44:472014-11-20 11:44:47Il Plate Solving con MaximDL
https://www.osservatorio-hypatia.it/wp-content/uploads/2014/11/10427674_519158714853548_6255494638199687088_n.jpg
803
960
Fabio Mortari
https://www.osservatorio-hypatia.it/wp-content/uploads/2020/08/hypa-300x85.png
Fabio Mortari2014-11-20 11:44:472014-11-20 11:44:47Il Plate Solving con MaximDL 0
0
Fabio Mortari
https://www.osservatorio-hypatia.it/wp-content/uploads/2020/08/hypa-300x85.png
Fabio Mortari2014-07-25 11:41:292014-07-25 11:41:29Eqmod: Installazione Ascom e Framework
https://www.osservatorio-hypatia.it/wp-content/uploads/2014/07/eqmod04.jpg
300
113
Fabio Mortari
https://www.osservatorio-hypatia.it/wp-content/uploads/2020/08/hypa-300x85.png
Fabio Mortari2014-07-23 19:59:292014-07-23 19:59:29Stazionamento Neq6 per utilizzo con Eqmod
0
0
Fabio Mortari
https://www.osservatorio-hypatia.it/wp-content/uploads/2020/08/hypa-300x85.png
Fabio Mortari2014-07-25 11:41:292014-07-25 11:41:29Eqmod: Installazione Ascom e Framework
https://www.osservatorio-hypatia.it/wp-content/uploads/2014/07/eqmod04.jpg
300
113
Fabio Mortari
https://www.osservatorio-hypatia.it/wp-content/uploads/2020/08/hypa-300x85.png
Fabio Mortari2014-07-23 19:59:292014-07-23 19:59:29Stazionamento Neq6 per utilizzo con Eqmod