
Alcuni Problemi con Pinpoint di MaximDL
Benritrovati e scusate l’assenza, ultimamente ho impiegato larga parte del mio tempo libero per studiare alcuni aspetti legati alla personale didattica sull’astroimaging, effettuando numerosissime uscite sotto il cielo stellato (pessimo) di casa mia.
Lo scopo di questo articolo è quello di fornire alcuni chiarimenti sulla reale utilità del Pinpoint di MaximDL (o altri software di risoluzione astrometrica di lastre) che è da intendersi a completamento dell’articolo precedentemente scritto al seguente LINK
Innanzitutto, va specificato che la funzione di risoluzione tramite Pinpoint non è la panacea di tutti i mali legati al puntamento, questo perchè sostanzialmente quando ci affidiamo ad un software che si “prefigge” di effettuare un determinato calcolo, ci stiamo mettendo nelle mani di quel mondo poco tangibile chiamato “informatica”. Si potrebbe dire che proprio la precisione di un calcolo a volte può rappresentare il grande limite degli elaboratori elettronici, molto rapidi in termini di operazioni effettuate al secondo ma non sempre intelligenti per quanto concerne la ricerca di vie piu rapide per ottenere risultati rapidi.
Nel rispetto di questa logica, quindi, per quanto un algoritmo sia performante e “scaltro” e ben scritto, quando questo entra in funzione la rapidità con cui estrapola il risultato è grosso modo tutta a carico della prestazione del PC e della sua capacità di ripetere l’algoritmo a determinate velocità.
Anticipato questo, non aspettatevi che il sistema pinpoint faccia tutto il lavoro da solo. Anzi. Da quello che è la mia esperienza (circa una ventina di uscite nel 2015) posso garantire che il sistema funziona alla grande solo se noi siamo davvero precisi con le operazioni preliminari che sono numerose e richiedono una buona concentrazione nelle fasi iniziali di stazionamento. Altra condizione importante (ma non obbligatoria!) per il rapido e corretto funzionamento è la disponibilità di postazioni fisse con situazioni “congelate”. Mentre per le postazioni itineranti, servono degli accorgimenti in piu onde evitare il ripetersi di una cascata di errori che potrebbero far abbandonare l’utilizzo.
Ma bisogna essere chiari: ci sono casi (che spiegherò in fondo all’articolo) in cui anche l’itinerante può godersi questa tecnologia e casi in cui invece è meglio affidarsi al nostro amato cercatore. Riprendendo il discorso, in buona sostanza è necessario ottenere i seguenti punti:
- Fuoco perfetto
- Posizione Home perfetta
- Corretta impostazione della focale del sistema di ripresa in maximDL
- Stazionamento al polo preciso (non dico un bigourdan, ma quasi…)
- Montatura alimentata “vigorosamente” (io alimento a 13v) onde evitare errati conteggi dei microstep
- Corretta impostazione del tipo di catalogo
- Possibilità di scattare per almeno 20 secondi senza rilevare stelle mosse.
- Specchi dei riflettori ben saldi e non soggetti a shift interni.
La mancanza di questi accorgimenti, può costringere il sistema ad effettuare lunghe operazioni di verifica sul posizionamento delle stelle a catalogo rispetto a quelle rilevate dal sensore e spesso può capitare che il sistema risolva addirittura erroneamente le lastre. Pertanto iniziamo col dire che ogni volta vi trovate ad aver risolto una lastra, dovrete verificare che la focale mostrata dal risultato sia compatibile con quella realmente utilizzata. Lo si verifica in questa sezione:
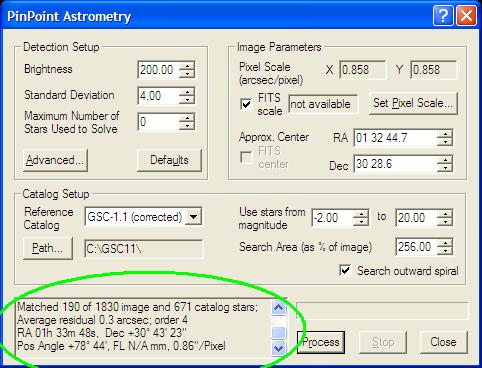
In questo caso ho effettuato una risoluzione su una lastra di test, dove la Focal Lenght (FL) viene riportata come N/A (Not Assigned). Ma in linea generale FL dovrebbe esser quanto di piu vicino a quella reale con leggeri scostamenti dovuti dal fuoco ottenuto in quella determinata serata. Ad esempio, se io utilizzo un telescopio con una lunghezza focale di 1.250mm, la FL riportata dovrà essere di valore oscillante tra i 1.260mm e i 1.190mm. Nota: diversamente, ipotizziamo che venga riportato un valore di 1.450mm o di 750mm, è evidente che la lastra non sia risolta correttamente e quindi si rende necessario ripetere l’operazione e non confermare il sync altrimenti addio oggetti centrati.
 Alcuni Problemi con Pinpoint di MaximDL
Alcuni Problemi con Pinpoint di MaximDL

Tra le problematiche indicate precedentemente, è opportuno sviscerarne qualcuna in modo da essere chiari e possibilmente risolutivi. Vediamole in elenco con la possibile soluzione:
- Fuoco perfetto:
Se il sistema di ripresa non è perfettamente a fuoco, il programma potrebbe non risolvere la lastra. Questo è dovuto al fatto che un allargamento delle stelle non permette una misura astrometrica reale tra gli astri col catalogo di riferimento, oltre a creare un problema per quel che riguarda la determinazione della dimensione e della luminosità delle stelle. Metodo personale: personalmente io lascio la montatura parcheggiata e faccio il fuoco direttamente nel campo di visualizzazione. Se non si lavora con focali troppo spinte e si sta riprendendo col CCD (notoriamente piu sensibile di una Reflex) si trovano sempre stelle di campo su cui focheggiare. I valori di riferimento per il fuoco li prendo dall’FWHM in quanto visualizzare il fuoco a monitor può trarre in inganno soprattutto nelle serate con pessimo seeing.
- Posizione Home perfetta: Come ho già avuto modo di spiegare nell’articolo citato all’inizio, la posizione HOME è cruciale. Ho potuto notare che anche leggerissimi scostamenti possono causare lungaggini enormi in termini di risoluzione. Inoltre, piu si lavora con focali lunghe e minore sarà il campo inquadrato con il risultato che la lastra potrebbe risolversi anche dopo 20 minuti (o piu…). Questo ovviamente dipende dal fatto che piu siamo lontani dalla posizione Home reale, e piu i calcoli degli step del goto porteranno ad un disallineamento pronunciato. Le procedure per ottenere una buona HOME sono descritte al seguente LINK. Inoltre considerate sempre che piu è lungo e largo il telescopio e piu sarà difficile determinare a occhio una posizione HOME corretta. Metodo Personale: non appena il cielo sarà sufficientemente sereno, perderò una serata per caricare sulla mia Eq6 il C8 a F10 con il sensore Atik314L, cercando di far risolvere una lastra in queste condizioni. Quando sarò riuscito a trovare la giusta posizione per ottenere una risoluzione di lastra in breve tempo, allora segnerò la posizione home con un taglierino (povera la mia eq6…). In questo modo, avrò la certezza che per quel che riguarda la posizione Home non sussisteranno problemi. Purtroppo questo metodo andrò contro all’ultimo punto (quello della garanzia sull’immobilità degli specchi) in quanto il C8 è notoriamente “shiffettaro” ma ritengo che la Home sarà quanto di piu vicino alla precisione.
- Corretta impostazione della focale di ripresa in MaximDL
Un altro elemento fondamentale per la corretta risoluzione delle lastre acquisite, è l’importazione della focale di ripresa in MaximDL. Anche in questo caso la procedura la trovate nell’articolo indicato a inizio pagina. Di questo va semplicemente ricordato che il calcolo sulla risoluzione per pixel effettuata dal sistema prevede (come da formula standard) la conoscenza della focale e della grandezza dei pixel. Mentre la grandezza del pixel viene inviata in automatico dal sensore, la focale va inserita a mano. Se siete soliti (come me) cambiare repentinamente setup da una serata all’altra, è basilare ricordarsi come prima operazione di inserire la focale corretta pena una attesa spropositata per ottenere una mancata o erronea risoluzione. Metodo Personale: ho imparato a salvare in MaximDL i setup con le focali di ripresa corrette e le coordinate del luogo di osservazione. In questo modo quando decido di riprendere con un setup, è sufficiente richiamare la configurazione opportuna. Quindi, verificare sempre all’avvio di maxim che lui “sappia” con che telescopio andrete a riprendere.
- Stazionamento al polo preciso
Per i motivi spiegati al punto 2, è opportuno effettuare un allineamento al polo preciso. Questo ovviamente non lo dico per chi già è navigato in questa passione, ma per coloro che (come si legge nei forum in generale) pensano che la montatura “basti buttarla a nord perchè tanto ci pensa l’elettronica” (e che poi si trovano con svalangate di problemi ndr..). Anche in questo caso, come in tutti i casi in cui si osserva o fotografa il cielo, è opportuno essere almeno “astrofili” nel senso tecnico della parola e quindi il polo va fatto. Come? Bene. Quanto bene? Piu che si può. Non dico un bigourdan, concediamoci un margine…ma bene. Buonsenso, mica altro. Metodo personale: Io utilizzo con successo il puntamento al polo assistito di Eqmod, come si può leggere a questo LINK
- Montatura ben alimentata
Sempre seguendo il concetto del miglioramento nell’utilizzo di Pinpoint, va detto che l’alimentazione della montatura è uno degli elementi piu “oscuri”. Da esperienza personale ho avuto problemi di puntamento risolti con una alimentazione migliore, utilizzando un alimentatore da 13V anzichè 12. Il problema pare essere dovuto ad un errato conteggo degli step dei motori qualora l’alimentazione sia insufficiente. Pertanto, se state utilizzando la modalità “itinerante”, considerate sempre l’utilizzo di batterie fresche e ben cariche.
- Corretta impostazione del Catalogo
Riporto un’esperienza negativa nell’utilizzo di Pinpoint anche relativamente al tipo di catalogo utilizzato. Normalmente viene dato per scontato che l’utilizzo del catalogo GSC sia quello necessario per il buon funzionamento del programma. Anche io son caduto in questo “tranello” finchè non mi son trovato a perdere un paio d’ore per effettuare dei test reali. Ho compreso che se iniziamo davvero a stringere il campo con sensori piccoli e lunghe focali, il catalogo GSC non è piu sufficiente. Il risultato è che Pinpoint inizia a passare molto velocemente grandi porzioni di cielo non trovando mai una configurazione di stelle analizzabile. (ripeto…analizzabile!! Quindi passa e va..velocemente…). Leggndo bene le guide di Maxim, ho poi scoperto che il catalogo GSC risolve solo campi entro i 15′, Diversamente bisogna appoggiarsi al calago USNO A2 che è molto piu completo e comprende stelle di magnitudine molto inferiore.. Reperire in rete questo catalogo non è cosa semplice, io ho avuto la fortuna di farmelo passare dall’Osservatorio Astronomico Monte San Lorenzo (LINK) ma sono circa 10 giga. A onor del vero, pare che si possano richiedere i CD oppure si possa scaricare dai server FTP di USNO, ma nel momento in cui ho provato io ho avuto problemi a scaricare il catalogo nella sua interezza. Nel caso, provateci che non si sa mai…
- Possibilità di scattare per almeno 20 secondi senza stelle mosse
Infine anche le stelle mosse contribuiscono a peggiorare la precisione e l’immediatezza del sistema di risoluzione astrometrica. Il punto è che spesso servono esposizioni di 15/20 secondi per fare in modo che vengano rilevate nel campo piu stelle possibili. Una posa con evidenti stelle mosse non permette ovviamente al sistema di rilevare realmente quali siano le stelle e che separazione astrometrica abbiano: tradotto, le stelle devono essere ferme pena un fallimento del metodo.
CONSIDERAZIONI FINALI
Ora, capisco che passando in disamina tutta la procedura corretta per garantirsi un efficace utilizzo del metodo lasci trapelare una certa insoddisfazione e una operatività noiosa e macchinosa. Questo è in parte vero, e non può essere rivolta alcuna critica al sistema in sè che rimane di indubbia qualità e utilità. Come anticipato a inizio articolo, infatti, il sistema effettua un paragone relativamente banale tra stelle di catalogo e stelle di campo ed il metodo con cui questo avviene si svolge attraverso il classico “conto della serva”: cioè a partendo dal centro della lastra, e muovendosi per step a spirale, il sistema va avanti a confrontare zone di cielo finchè non trova quella giusta.
Il punto è che di fatto questo metodo può essere utilizzato con successo per situazioni determinate, mentre per altre situazioni può rivelarsi controproducente.
In breve, a mio avviso e dopo un utilizzo serrato di pinpoint, potrei suggerire che il sistema trova la piena efficacia quando si ha a disposizione una postazione fissa oppure quando si effettuano sessioni di astroimaging per le quali si prevede una “ripresa dei lavori” in piu sessioni. Ad esempio, utilizzando un sensore monocromatico con filtri a banda stretta (giusto un esempio eh), si potrebbe non riuscire a terminare il lavoro in una sola nottata. Pertanto può essere utile avere un centro lastra a coordinate certe, con tanto di rotazione del sensore in modo da poter riprendere anche dopo diverso tempo la sessione da dove si era terminata. Altro caso di importante utilità è ovviamente la ricerca amatoriale, in cui ci si voglia garantire una ripresa con dati astrometrici o fotometrici in piu sessioni (esempio la fotometria sulle stelle variabili). Insomma,. per tutti i casi in cui sia necessaria la ripetibilità assoluta di un puntamento è consigliabile utilizzare il pinpoint. Infine, per i casi in cui l’astrofilo sia un pò Nerd come il sottoscritto ahahaha
Viceversa, qualora si intenda sfruttare una postazione mobile per riprendere un oggetto con un sensore a colori e per una serata sola, può rivelarsi piu concreto l’utilizzo del “vecchio” metodo del cercatore. A maggior ragione quando si utilizza una Reflex in Live View che permette di centrare gli oggetti molto piu agevolmente. In questo caso, tentare la strada del puntamento astrometrico automatico potrebbe richiedere una precisione “indebita” col rischio di complicare la sessione e rendere l’inizio delle riprese piu frustrante e problematico.





